
Grasping without Squeezing
Grasping without Squeezing


Robotic Grasping of Large Objects

Demo of Film Grasping Ball

Demo of Bi-stable Grasping Device

Passive Catching of Tossed Ball
Leveraging the unique mechanics of controllable gecko-inspired adhesives, we are able to grasp objects without applying a normal force. Instead, we rely only on the contact area between the gripper and the object.
Human Climbing with Gecko Adhesives
Human Climbing with Gecko Adhesives


NYTimes ScienceTake | Harnessing Gecko Power by David Frank

Sensor Images of Tokay Gecko Feet

Stanford Scientists Save Spider-Man

Climbing with Gecko Adhesives
While numerous variations of synthetic gecko-inspired adhesives have been shown to provide strong, reusable adhesion, we focused on scaling this adhesion to the sizes needed to support a human. With special attention to load sharing, we were able to climb a glass wall with a hand-sized area of synthetic adhesive.
Hawkes E.W., Eason E.V., Christensen .DL., Cutkosky M.R. 2015 "Human climbing with efficiently scaled gecko-inspired dry adhesives." Journal of the Royal Society Interface 12: 20140675. Online Preprint
Inverse Pneumatic Artificial Muscle (IPAM)
Inverse Pneumatic Artificial Muscle (IPAM)


IPAM Lifting 2kg

IPAM Lifting and Launching ICRA Duck

Animation Explaining Concept

500% Strain Demo
Instead of inflating our artificial muscle to cause contraction as traditional pneumatic artificial muscles (PAMs) do, we inflate to lengthen, or relax, the muscle. In doing so, we store elastic energy that can powerfully released on command. This scheme of actuation also allows for unprecedented strain rates from our actuators.
MicroClimber
MicroClimber


MicroClimber Hoisting Old Stickybot

MicroClimber Demo

Animation of Climbing

20 mg MicroClimber Hoisting 500 g
We developed two small-scale robotic climbers that can hoist many times their weight. One is 9 g and is powered by a single servo motor, using an inchworm gait to move up the wall while carrying over 1 kg (>100x bodyweight). The second is a tiny 20 mg climbing, powered by SMA that can hoist 500 mg.
One Motor, Two Degrees of Freedom
One Motor, Two Degrees of Freedom


High-speed Video of Switching

Etch-a-Sketch Demo

One Motor Two Degrees of Freedom (full length)
We designed and built a system that can control two outputs with a single motor. The device relies on a clutch that is controlled by the motor speed and position.
Hawkes, E.W., Christensen, D.L., Pope, M.T., and Cutkosky, M.R., "One Motor, Two Degrees of Freedom through Dynamic Response Switching." Robotics and Automation Letters.Published online February 15, 2016. http://dx.doi.org/10.1109/LRA.2016.2526066
Soft Exomuscles for Rehabilitation

We are developing a soft exoskeleton, or rather an exomuscle, to help offload certain muscles of the upper body to aid in Activities of Daily Living (ADLs) for stroke patients.
Assistive Device for Decreasing the Cost of Running Locomotion

We are investigating methods of reducing the cost of running through wearable assistive devices.
Vine-like Robots

We are developing a new type of soft robot that exhibits the behavior of apical extension. This form of movement, growth from the tip, is found across kingdoms and length scales, from vines to tiny cells such as fungal hyphae, pollen tubes, and root hairs, to growing neurons.
Catheter Design


We are working with Neurosurgeons and Interventional Neuroradiologists at Stanford Hospital to design new catheters for accessing challenging physiology in the brain. Images: Dr. Jeremy Heit.
Untethered shape-changing robots

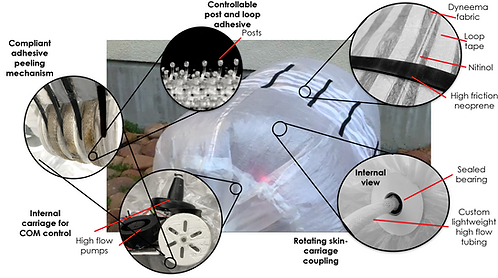
We are designing untethered robots that are able to exert human-scale forces. To do so we to use large inflatable skins in order increase functionality and lifting capacity.
M. Devlin, M. Dickens, C. Xiao, E. Hawkes, “SPHR: A Soft Pneumatic Hybrid Robot with extreme shape changing and lifting abilities” IROS. Prague, Czech Republic 2021, DOI: 10.1109/IROS51168.2021.9636076
M. Devlin, B. Young, D. Haggerty, N. Naclerio, E. Hawkes. “An untethered soft cellular robot with variable volume, friction, and unit-to-unit cohesion” IROS. Las Vegas, NV, 2020, DOI: 10.1109/IROS45743.2020.9341351
Nature inspired burrowing robot

We developed a burrowing robots that grows like a plant roots to reduce friction and enable steering underground. Further, the robot blows air out its tip to reduce soil strength and control lift forces.
Plant-Root Inspired Anchoring

We are developing a plant-root inspired anchoring mechanism for digging and deploying subsurfaces sensors in environments where reaction forces are difficult to produce, such as on a moon or asteroid.